Journal of Machine Intelligence and Data Science (JMIDS)

Volume 5 - Year 2024 - Pages 54-64
DOI: 10.11159/jmids.2024.007
Hybrid CNN-GRU Model for Exercise Classification Using IMU Time-Series Data
Jing Zhang1, MengCheng Lau1, Ziping Zhu1
1Bharti School of Engineering and Computer Science
Laurentian University
935 Ramsey Lake Rd, Sudbury, ON, P3E 2C6, Canada
jzhang17@laurentian.ca; mclau@laurentian.ca; zzhu4@laurentian.ca
Abstract - We introduce a hybrid CNN-GRU model in this study to classify exercises using IMU time-series data, with a focus on jumping jacks, lunges, and squats. By combining Convolutional Neural Networks with Gated Recurrent Units, our model effectively manages the high dimensionality and variable sampling rates of IMU data. We employed data normalisation and augmentation techniques to refine the dataset. Our model showed high accuracy in classifying types of exercises, highlighting its potential in motion classification and fitness-tracking applications. These results emphasise the value of hybrid deep learning methods in analysing complex time-series data and make a significant contribution to the understanding of human exercise movement patterns.
Keywords: Motion Classification, IMU, Deep Learning, CNN-GRU.
© Copyright 2024 Authors - This is an Open Access article published under the Creative Commons Attribution License terms. Unrestricted use, distribution, and reproduction in any medium are permitted, provided the original work is properly cited.
Date Received:2024-02-01
Date Revised: 2023-07-15
Date Accepted: 2024-08-03
Date Published: 2024-09-06
1. Introduction
Advancements in exercise physiology and sports psychology have driven the evolution of exercise classification, a multidisciplinary field crucial to health and fitness, sports science, and public health policy. This classification plays a vital role in crafting targeted exercise plans and gauging the impact of physical activities. With the integration of machine learning and data analysis, classification has grown more sophisticated, offering more personalised fitness advice and improving injury prevention in sports medicine. Recent technological strides have pivoted the focus to time-series data from Inertial Measurement Unit (IMU) sensors, which are widespread in smartphones and wearable devices. These sensors, which we prefer over video data, provide precise measurements of physical movements and are less intrusive, making them perfect for capturing the subtleties of exercises while preserving privacy. Traditional classification models like Support Vector Machine (SVM), Random Forest (RF), K-Nearest Neighbours (KNN), and Hidden Markov Models (HMM) struggle with the high-dimensional nature of time-series data. Each model comes with strengths—for instance, SVM's robustness in high dimensions and RF's proficiency in unravelling complex data relationships. Yet, they also grapple with issues like computational inefficiency and challenges in capturing time-series data's temporal dynamics. As a result, exercise classification is increasingly harnessing advanced IMU sensor data, driving the need for sophisticated models capable of efficiently and accurately navigating its complexity and dimensionality for motion recognition and classification.
Our study sets out to improve motion classification using IMU time-series data by developing a hybrid CNN-GRU model. This model marries Convolutional Neural Networks (CNNs) for spatial feature extraction with Gated Recurrent Units (GRUs) to capture temporal dynamics, tackling the high-dimensional challenge of IMU data. We focus on the model's ability to process IMU data with varying sampling rates and to boost classification efficiency and accuracy. Through a comparative analysis with current models, we will confirm the superiority of this hybrid approach. We anticipate that our model, which integrates CNNs with GRUs, will make a significant mark in managing complex IMU time-series data for exercise motion classification.
2. Related Work
Significant evolution marks the field of exercise classification, which now blends traditional methods with cutting-edge technologies. Lu et al. [1] have pioneered the use of IMU data for fine-grained activity recognition, thus paving new paths in this domain. Wang et al. [2] advanced the field by using HMMs for arm gesture classification with IMUs in medical rehabilitation, highlighting the method's diverse applications. Recently, researchers have been investigating the capabilities of CNNs and GRUs under various circumstances. Ahmed et al. [3] employed a combination of CNN, LSTM, and GRU models, including hybrid CNN-GRU architectures, for speech emotion recognition. Chiu et al. [4] put into action a CNN-GRU hybrid network to forecast building energy consumption, underlining the combined strengths of CNNs and GRUs in capturing spatiotemporal features. In a similar vein, Khan et al. [5] utilised a CNN-LSTM model for motion classification with depth camera sensors, proving the adaptability of these models with different types of sensor data.
IMU data has played a pivotal role in classification tasks. Eyobu et al. [6] have brought forward innovative data augmentation methods such as window slicing and jittering for IMU data in Human Activity Recognition (HAR). Wang et al. [7] evaluated individual models like CNN, LSTM, and GRU for animal behaviour classification, demonstrating their efficacy. Concurrently, Ferrari et al. [8] employed CNN-based ResNet models for human activity recognition using accelerometer data, thus expanding the horizons of IMU data usage. Although current research is expansive, it reveals discernible gaps. Theissler et al. [9] underscore the demand for explainable AI in time series classification, a niche that current models have scarcely filled. Small et al. [10] have probed the impact of reduced accelerometer sampling rates on activity monitoring, hinting at more efficient data collection methods. The resampling methods that Wang et al. [11] suggested for sensor data augmentation could address challenges associated with scarce labelled data. Broad overviews provided by Lima et al. [12] and Kim et al. [13] suggest a strong need for further empirical research that utilises detailed datasets and testing to confirm these methods' practicality. These identified gaps offer chances for future research endeavours to develop more efficient, explainable, and empirically proven methods in exercise classification.
3. Methodology
3.1. CNN and GRU
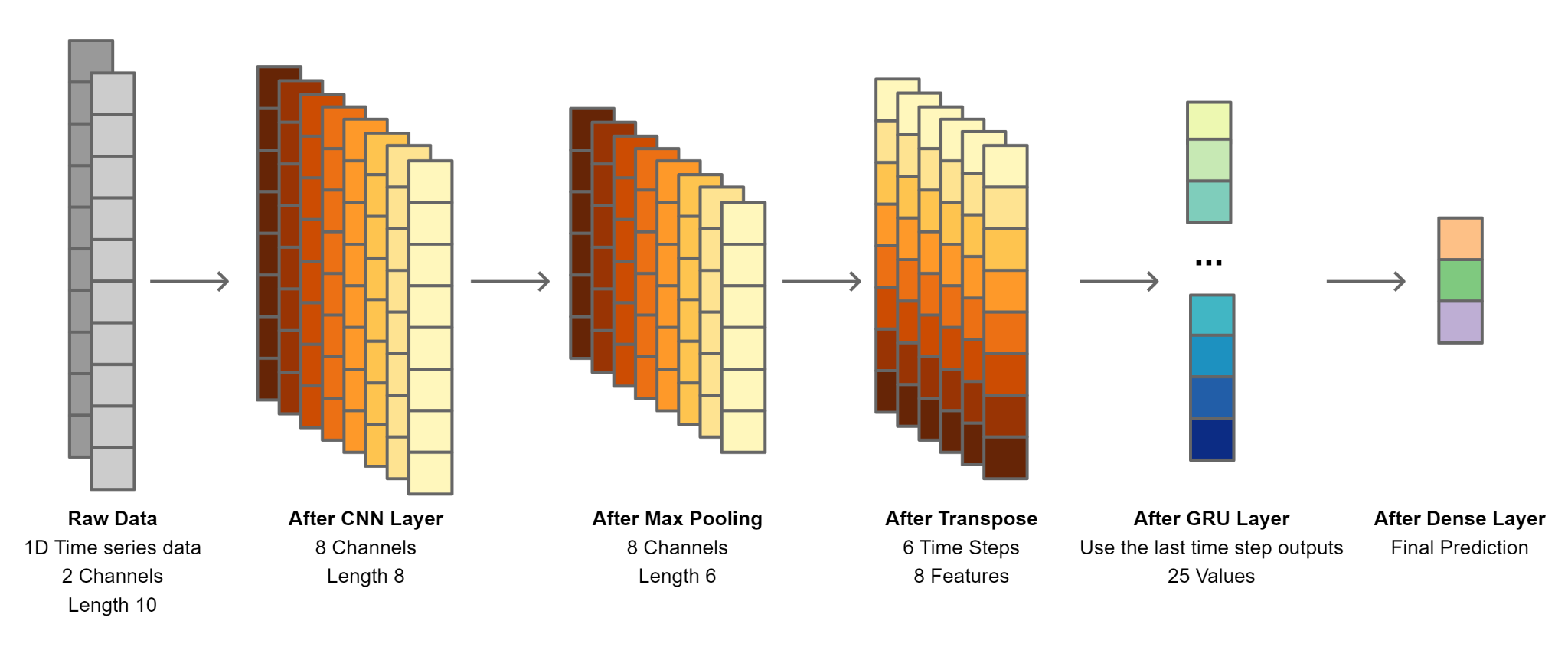
We deploy this research on a CNN-GRU hybrid deep learning model that combines CNN and GRU architectures to focus on motion analysis from IMU time series data. This hybrid model uses CNN for spatial feature extraction and GRU for temporal sequence processing. The CNN component structures itself to effectively process the time-series input data, with convolutional layers that employ a set of learnable filters. These filters capture spatial dependencies through convolution operations between the filters and the input, creating feature maps. Batch normalisation follows the convolutional layers to stabilise the learning process and enhance the model’s efficiency. We can optionally insert a pooling layer to reduce the output's spatial dimensions, which helps lower computational demands and prevent overfitting.
The GRU component, succeeding the CNN, processes the temporal features we extracted earlier. GRUs are adept at handling data sequences, with each unit featuring an update and a reset gate that govern the flow of information, crucial for capturing the temporal dynamics and dependencies in IMU data. We integrate by extracting spatial features with the CNN, then normalising these features and transposing the matrix for GRU compatibility. The GRU processes these normalised features, culminating in a final classification output from a fully connected layer that merges spatial and temporal insights, as illustrated in Figure 1.
3.2. Data Collection
We gathered data for this study using an Android application named "Sensor Logger"[14] that is selected for its precise capture of a wide spectrum of motion data. The first participant executed a series of exercises – Jumping Jack, Lunge, and Squat – repeating each exercise in ten distinct sets to ensure a diverse and comprehensive dataset that captures a range of bodily motions and exercise dynamics. The app collected IMU data, which included accelerometer readings along the x, y, and z axes to track linear acceleration movements, and orientation data through quaternions (qx, qy, qz, qw) and Euler angles (roll, pitch, yaw). We recorded total acceleration data on the x, y, and z axes, providing a full view of the dynamic and static forces on the body during exercises. However, the sampling rates of these sensor readings varied due to the performance constraints of mobile devices and limitations in the Android operating system. For example, the accelerometer's sampling rate during the Jumping Jack exercise fluctuated between 52.7128 Hz and 52.7148 Hz, and the orientation sensor's rate varied between 59.5660 Hz and 60.4022 Hz.
To standardise the variable sampling rates, we applied a uniform down-sampling procedure to all the data, setting it to a consistent rate of 50 Hz. We used interpolation methods to align all data types to this fixed frequency, ensuring dataset consistency and comparability. After standardisation, we segmented the continuous raw sensor data into discrete sets corresponding to the specific exercises performed, resulting in 30 labelled datasets, with ten for each exercise type. We based the segmentation on pattern detection through human observation and expertise, and we implemented this in Python to automatically distinguish and separate different exercise movements. To augment the original dataset's limited size of 30 exercise groups and enhance its size and diversity, we applied data augmentation techniques. We introduced realistic variability by adding random multiplicative noise to 30% of the sampling points, each multiplied by a random coefficient ranging from 0.8 to 1.1. Moreover, we generated new subsequence from each exercise sequence by randomly selecting start and end points within the original sequences, thereby expanding the dataset and introducing randomness crucial for a diverse and robust training set.
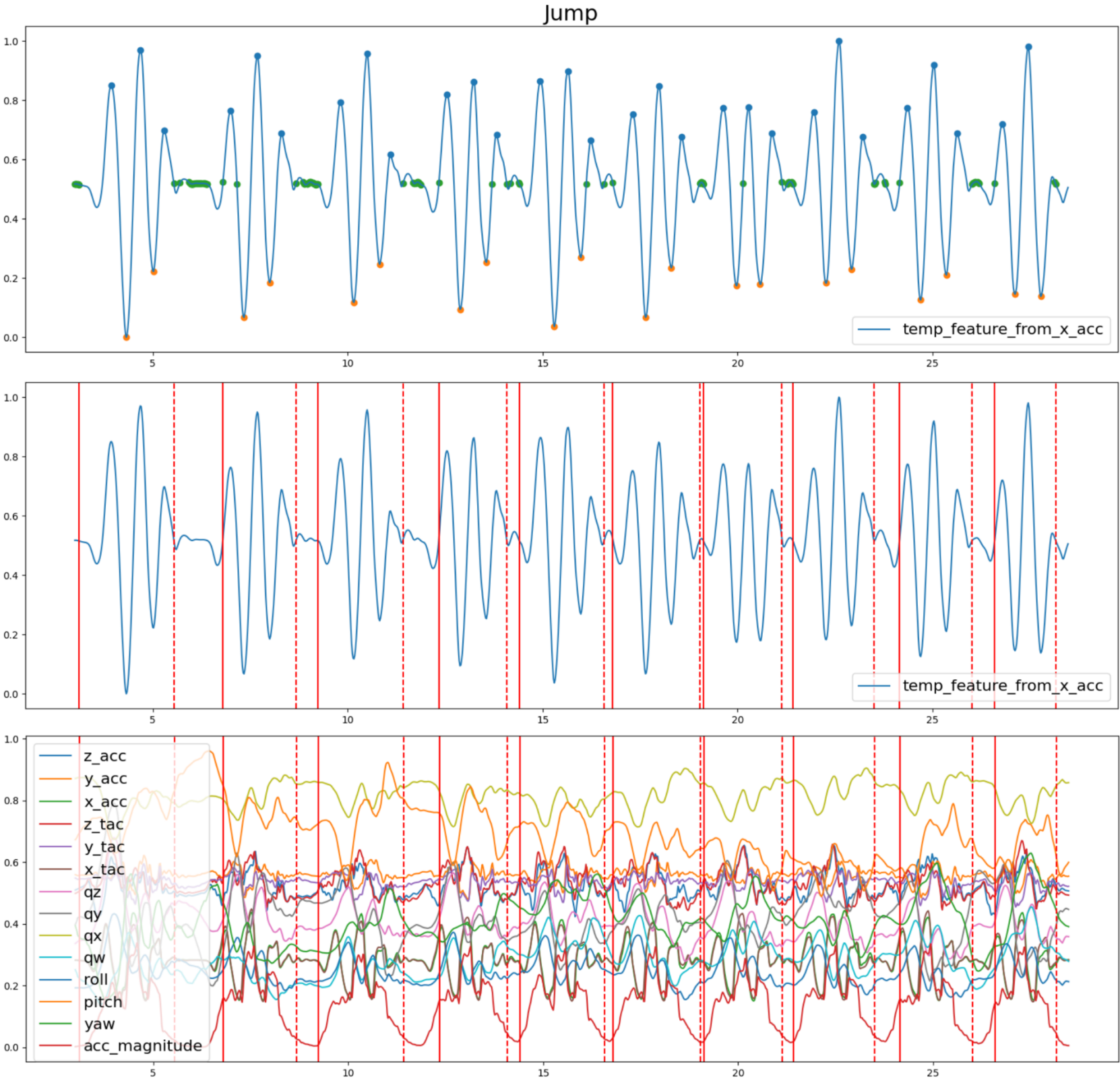
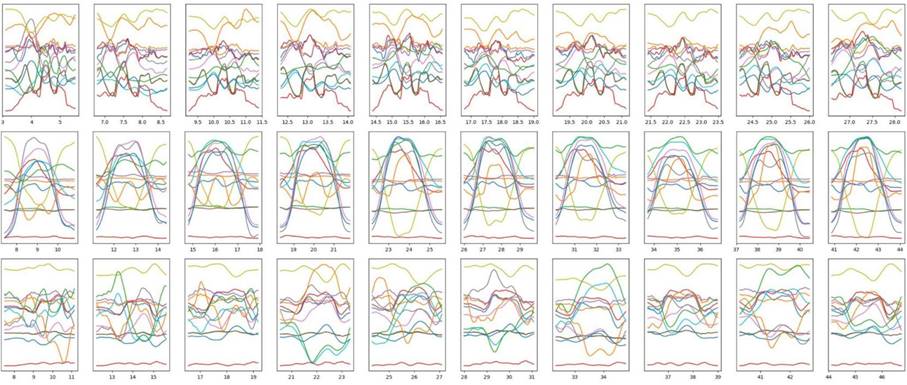
Another key aspect of data pre-processing was addressing the variability in the time durations taken by the participants to complete each exercise instance, resulting in inconsistent numbers of samples per set. We used interpolation to standardise each dataset to a fixed number of samples, as demonstrated in Figure 2. This method did not compromise the model's accuracy but significantly reduced the computational load during training. Additionally, we employed data visualisation techniques to confirm that the critical motion characteristics and patterns remained intact, ensuring the dataset's integrity and applicability for training the CNN-GRU model. Figure 3 displays the sampled dataset performed by the first participant.
In addition to the initial dataset, an additional set of exercises was performed by the second participant under similar conditions, creating another comprehensive dataset. This second dataset, however, was used solely to test the robustness and generalizability of the trained model and was not included in the training process. The data collection and processing methods for the second dataset mirrored those of the first, ensuring consistency and comparability. The inclusion of this additional dataset provided a valuable opportunity to evaluate the model's performance on unseen data, further validating its effectiveness and robustness.
3.3. Model Training
We structured the training of the hybrid CNN-GRU model and divided the IMU dataset into an 80% training set and a 20% test set to ensure comprehensive training and substantial unbiased evaluation. We fine-tuned significant architectural parameters, such as convolutional kernel sizes and the choice between max and average pooling layers, to optimise the model, deliberately excluding padding from these layers to concentrate on core motion patterns. We selected training parameters like learning rate, batch size, and the number of epochs with an eye on balancing efficiency and the use of computational resources. We chose all hyperparameters through a grid search cross-validation strategy to boost machine learning performance metrics like accuracy and efficiency. Since we set hyperparameters before learning, the system could not correlate them with the data, necessitating an exhaustive exploration of their combinations to find the optimal set. Our grid search cross-validation strategy varied parameters within predefined ranges to rigorously test the model's sensitivity to different hyperparameter combinations. This systematic exploration of the parameter space helped us find a balance between maximising prediction accuracy and the efficient use of computing resources. We used accuracy as the primary performance metric during training, providing direct and clear feedback on the model's effectiveness, especially during regular assessments with the 20% test set. This focused evaluation strategy allowed for timely and precise model adjustments, securing its accurate exercise classification capability and demonstrating the utility and efficacy of our methodology in deep learning applications for motion classification.
4. Implementation
We implemented the CNN-GRU model using Python and the PyTorch framework, renowned for its neural network modelling efficiency. Google Colab served as our primary platform, providing access to high-performance GPUs. This setup offered us a powerful combination of flexibility and computational strength, perfectly suited for deep learning tasks without the need for sophisticated local hardware. At the project's outset, we established the Python environment in Google Colab, installing PyTorch and preparing dependencies. We formatted and normalised the pre-processed IMU data, preparing it for the training phase. Then, we constructed the CNN-GRU model, coding the convolutional and GRU layers and integrating essential components for effective learning. Key training parameters like learning rate, batch size, and epoch count were set, along with tools for monitoring the model's training progress. The model was trained with the training set, constantly monitored, and fine-tuned based on performance metrics. After training, we tested the model on the test set to assess its accuracy and generalisation capability. We addressed challenges like variable IMU data sampling rates and durations by applying interpolation for standardisation. To enrich the dataset, we used data augmentation methods, including noise addition and subsequence extraction. We managed the computational demands by utilising Google Colab’s GPU resources, which ensured an efficient training process. These steps were critical in developing a high-performing and robust CNN-GRU model for motion classification, overcoming obstacles to enhance performance, and proving the model's practicality in deep learning for motion analysis.
To further evaluate the model’s robustness and generalizability, we tested it on the additional unseen dataset, which was collected under similar conditions but from a different participant. This additional testing phase involved rigorous analysis to ensure that the model’s high performance was not limited to the initial dataset.
5. Results and Discussion
5.1. Model Evaluation
Table 1 shows the performance evaluation of various models on both the training and test sets revealed significant findings. The Random Forest model showed an accuracy of 0.81 on the training set and 0.85 on the test set, serves as a robust baseline and demonstrates decent generalization capabilities. However, its performance is limited by its inherent inability to capture complex, non-linear relationships as effectively as deep learning models. The Support Vector Machine (SVM) model exhibited higher accuracy, with 0.91 on the training set and 0.90 on the test set. This model is traditionally valued for its effectiveness in high-dimensional spaces and for its ability to model complex boundaries using kernel tricks. Despite these strengths, the SVM struggles with very large datasets and extensive feature interactions, which are characteristic of complex sensor data. The Convolutional Neural Network (CNN) model showed improved accuracy, achieving 0.94 on the training and 0.91 on the test sets. CNNs excel in extracting spatial hierarchies of features and are particularly suited for datasets where spatial relationships are predictive of the outcome, as is often the case with IMU sensor data. The Gated Recurrent Unit (GRU) model matched CNN's test set accuracy at 0.91 but was slightly lower on the training set with 0.90. GRUs are adept at processing time-series data by capturing temporal dependencies, making them ideal for sequential sensor data. However, GRUs alone might not fully leverage the spatial aspects of the data, which are critical in sensor applications.
The CNN-GRU hybrid model outperformed all individual models, achieving perfect accuracy on the training set and 0.97 on the test set. This hybrid model combines the spatial feature extraction capabilities of CNNs with the temporal modelling prowess of GRUs, providing a comprehensive approach to handling IMU sensor data, which contains both spatial and temporal patterns. This dual ability allows the CNN-GRU hybrid to excel, particularly in complex scenarios where both aspects of the data are crucial for accurate predictions.
Additionally, we tested the models on the second dataset (Dataset 2), which was entirely used for testing purposes to further evaluate their robustness and generalisability. The CNN model achieved an accuracy of 0.92, a recall of 0.90, and an F1-score of 0.90 on the second test set. This indicates that while the CNN is highly effective at extracting relevant features even from a completely unseen dataset, there remains a slight drop in performance compared to the training scenarios, possibly due to the variations in data distribution. The GRU model achieved a precision of 0.90, a recall of 0.87, and an F1-score of 0.86. The slightly lower scores compared to the CNN model highlight the GRU’s challenges in dealing with the spatial aspects of the data that are better captured by the convolutional layers of the CNN. This performance dip underscores the GRU’s primary strength in temporal data processing, which might be less effective alone in scenarios where spatial features also play a crucial role. The CNN-GRU Hybrid model again demonstrated superior performance with a precision of 0.94, a recall of 0.93, and an F1-score of 0.93 on the second test set. This exceptional performance underscores the hybrid model’s capability to effectively integrate and leverage both spatial and temporal features of the data. The CNN component’s ability to interpret spatial patterns and the GRU’s proficiency in analysing time-series data complement each other, enabling the hybrid model to maintain high accuracy and robustness even when confronted with new, potentially more complex datasets. This reinforces the CNN-GRU hybrid modal’s adaptability and its suitability for diverse application scenarios, confirming its superiority over the individual models.
This comprehensive evaluation demonstrates that the CNN-GRU hybrid model not only surpasses traditional models like RF and SVM in handling complex sensor data but also excels in robustness and adaptability across diverse testing scenarios. This confirms its potential as a superior approach in advanced sensor data applications.
Table 1: Execution results of all learning models (1.00=100%)
|
Dataset |
Model |
Data Type |
Precision |
Recall |
F1-Score |
|
Dataset 1 |
Random Forest |
Train Set |
0.81 |
0.72 |
0.65 |
|
Test Set |
0.85 |
0.81 |
0.78 |
||
|
Support Vector Machine |
Train Set |
0.91 |
0.87 |
0.87 |
|
|
Test Set |
0.90 |
0.86 |
0.85 |
||
|
CNN |
Train Set |
0.94 |
0.94 |
0.94 |
|
|
Test Set |
0.91 |
0.89 |
0.88 |
||
|
GRU |
Train Set |
0.90 |
0.89 |
0.88 |
|
|
Test Set |
0.91 |
0.89 |
0.88 |
||
|
CNN-GRU |
Train Set |
1.00 |
1.00 |
1.00 |
|
|
Test Set |
0.97 |
0.97 |
0.97 |
||
|
Dataset 2 |
CNN |
Test Set |
0.92 |
0.90 |
0.90 |
|
GRU |
Test Set |
0.90 |
0.87 |
0.86 |
|
|
CNN-GRU |
Test Set |
0.94 |
0.93 |
0.93 |
Figure 4 shows the training and test loss trajectories across epochs for CNN, GRU, and CNN-GRU models. The CNN graph demonstrates a consistent reduction in both training and test losses decrease steadily, indicating effective learning and robust generalisation capabilities. The steady decline suggests that the CNN model is well-suited for capturing the spatial patterns in the dataset without overfitting. In contrast, the GRU graph shows high volatility with significant fluctuations in test loss, suggesting possible overfitting, sensitivity to the choice of hyperparameters, or challenges in the model’s ability to handle temporal dependencies with the given settings. Such spikes in loss highlight the need for careful tuning of the model, possibly adjusting learning rates or regularization strategies. The CNN-GRU hybrid graph exhibits a promising start with a smooth decline in training loss, yet the test loss presents variability that stabilizes after initial fluctuations. This pattern suggests that an early tendency towards overfitting, which the model manages to mitigate as training progresses. The stabilization and slight increase in test loss towards later epochs could be a sign of the model beginning to generalize better after initially fitting too closely to the training data.
This comparison suggests the distinct learning behaviours of the models: the CNN is learning most consistently, the GRU may have difficulty capturing the temporal patterns or could be sensitive to hyperparameters, and the CNN-GRU combines elements of both, with a potential for overfitting that needs to be monitored. This analysis supports the conclusion that while individual models have their specific strengths and weaknesses, the CNN-GRU hybrid model leverages the advantages of both to achieve superior performance, as evidenced by its perfect scores on the training set and robust results on the test set. The hybrid model’s success in handling the IMU data signifies a substantial advancement in exercise classification accuracy, demonstrating the potential of combining convolutional and recurrent neural networks.
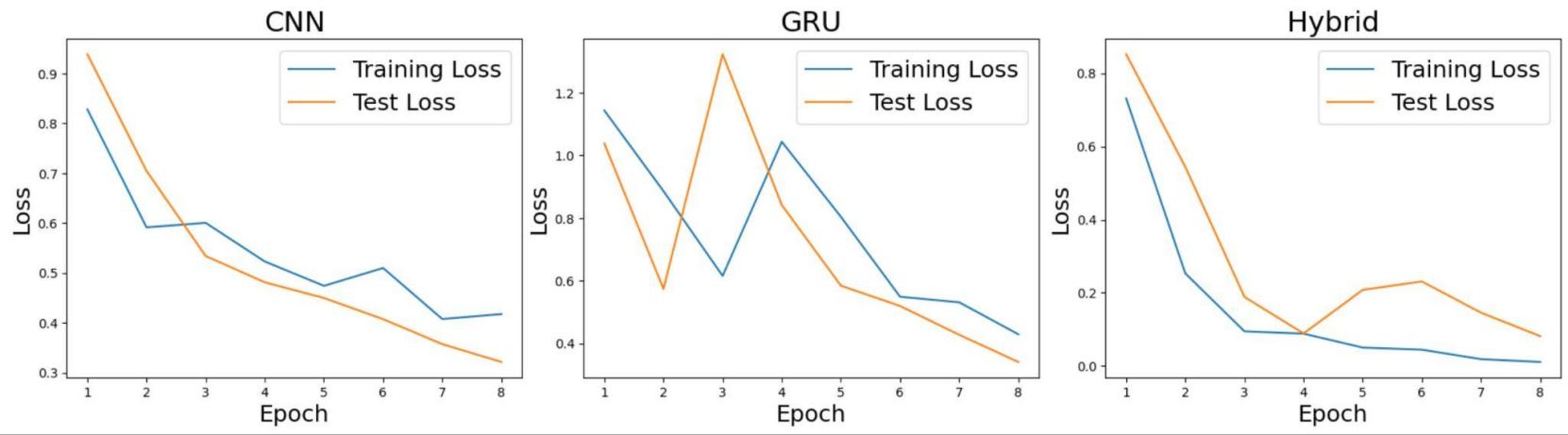
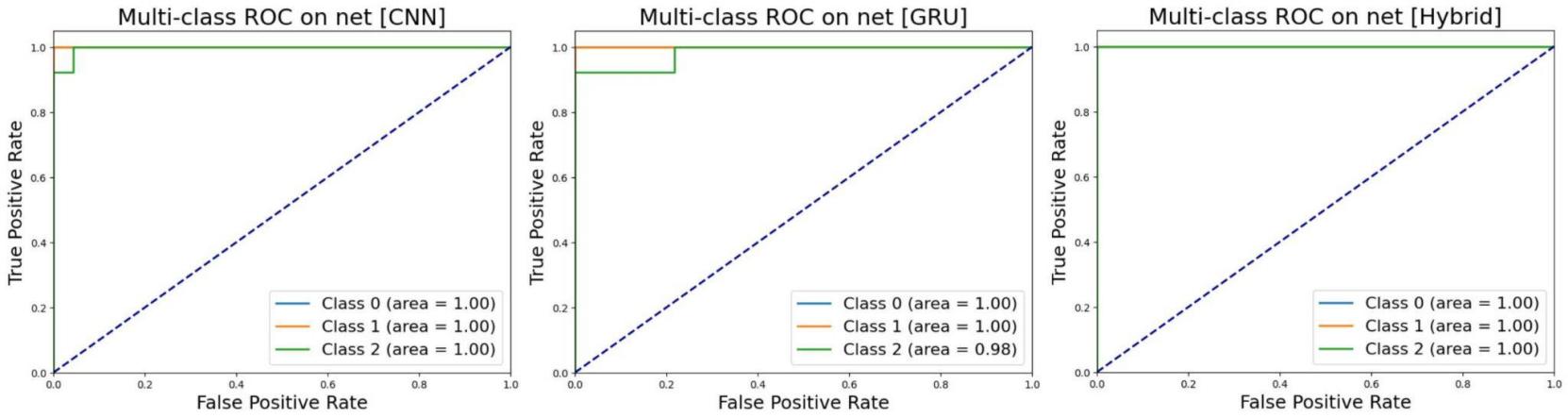
Figure 5 provides an overview of ROC curves for the three models that exhibit exceptional classification performance on the first set of test data for this multi-class problem where class 0, class 1, and class 2 represent jumping jack, lunge, and squat movements, respectively. All three models achieve perfect or near-perfect Area Under the Curve (AUC) scores of 1.00 across most classes, indicating an excellent true positive rate without increasing the false positive rate. The slight deviation seen in the GRU model for class 2, with an AUC of 0.98, suggests a marginally lower but still outstanding ability to classify squats compared to the other movements. Overall, the near-identical AUC scores across all classes for each model suggest that all models are highly effective for this specific test dataset, although such perfect classification is uncommon in practice and could warrant further investigation to ensure the models' robustness. This remarkable performance may also imply that the dataset is well-suited to the models’ strengths or possibly lacks the complexity found in more variable real-world data.
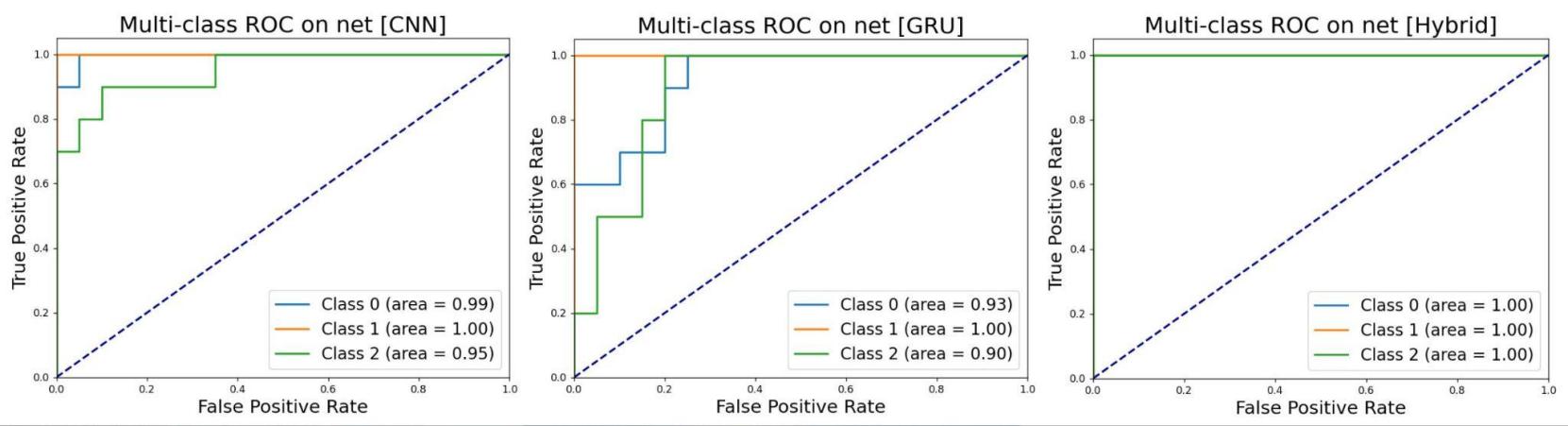
Figure 6 shows the ROC curves for the same three models but evaluated on the unseen dataset (Dataset 2). The ROC curves for this dataset indicate that the CNN model achieved AUC scores of 0.99, 1.00, and 0.95 for classes 0, 1, and 2, respectively. This highlights a consistent performance with slight variations in identifying class 2 (squats), which may benefit from further model tuning or data augmentation strategies. The GRU model achieved AUC scores of 0.93, 1.00, and 0.90 for these classes, revealing its robust capability for class 1 but showing room for improvement in classifying more complex movement patterns of jumping jacks and squats. Meanwhile the CNN-GRU hybrid model consistently achieved perfect AUC scores of 1.00 across all classes, demonstrating its superior adaptability and effectiveness across different movement types. This underscores the hybrid model’s exceptional capacity to integrate spatial and temporal features effectively, optimising performance even in challenging classification scenarios.
These results demonstrate the models’ robustness and generalizability, with the CNN-GRU hybrid model consistently showing superior performance. The slightly lower AUC scores for some classes in the CNN and GRU models suggest potential areas for further optimization, but overall, the high AUC scores across both datasets not only highlight the effectiveness of the models in classifying exercise movements but also suggest that the hybrid approach, in particular, may offer the most reliable method for dealing with diverse and challenging movement classification tasks in practical applications. This consistent excellence across diverse testing conditions speaks to the hybrid model’s potential as a robust tool for advanced motion analysis and other related fields.
5.2. Discussion
The high accuracy and F1 scores achieved by the CNN and GRU models indicate their strength in extracting spatial and temporal features, respectively. However, the hybrid CNN-GRU model's superior performance suggests that integrating these models' strengths can capture the nuances of IMU data more effectively, leading to better classification outcomes. The findings align with existing literature that posits the superiority of hybrid deep learning models in various classification tasks. Studies like Lu et al. [1] and Ahmed et al. [15] have previously demonstrated the effectiveness of combining different neural network architectures, and our results further corroborate these observations in the context of exercise classification. The CNN-GRU model's high accuracy and generalisation capability indicate its potential for real-world applications, such as fitness tracking and rehabilitation monitoring. However, the model's complexity and the need for substantial computational resources might limit its deployment in resource-constrained environments. Future research could focus on optimising the model's computational efficiency and exploring its applicability in broader real-world scenarios.
6. Conclusion
This study evaluated the performance of various models, including traditional machine learning and advanced deep learning techniques, for classifying exercises using IMU data. The findings unambiguously demonstrate the superior performance of deep learning models, with the CNN-GRU hybrid model standing out by achieving nearly perfect accuracy. Specifically, the CNN-GRU model outperformed traditional models such as Random Forest and Support Vector Machine and individual deep learning models like CNN and GRU in terms of precision, recall, and F1-score across both training and test sets. The results of this study have significant implications for the development of advanced exercise classification systems. By demonstrating the effectiveness of the CNN-GRU hybrid model, this research highlights the potential of combining convolutional and recurrent neural networks to handle the spatial-temporal complexity inherent in IMU data. This insight is precious for health and fitness technology applications, where accurate exercise classification can contribute to personalised fitness tracking and rehabilitation programs. While the CNN-GRU model shows promising results, this study opens several avenues for future research. One potential area is exploring the model's applicability in real-time exercise classification systems, considering the computational demands of deep learning models. Additionally, future work could investigate the model's performance across a broader range of physical activities and in more diverse datasets, including those with varying levels of complexity and granularity. Another promising direction is enhancing the model's interpretability and explainability, which is crucial for applications in clinical settings where understanding model decisions can be as important as the decisions themselves. Lastly, research could also focus on optimising the model for deployment on edge devices, enabling more widespread and accessible fitness and health monitoring solutions. In conclusion, this study contributes to the growing body of knowledge on exercise classification, affirming the value of hybrid deep learning models in achieving high accuracy in complex classification tasks. With its robust performance, the CNN-GRU model sets a new benchmark in the field and serves as a foundation for future innovations in exercise recognition and related areas.
References
[1] Y. Lu and S. Velipasalar, "Autonomous Human Activity Classification From Wearable Multi-Modal Sensors," IEEE Sensors Journal, vol. 19, no. 23, pp. 11403-11412, Dec. 2019, doi: https://doi.org/10.1109/jsen.2019.2934678. View Article
[2] D. Wang, X. Meng, J. Wang, and Y. Liu, "HMM-based IMU data processing for arm gesture classification and motion tracking," International Journal of Modelling, Identification and Control, vol. 42, no. 1, p. 54, 2023, doi: https://doi.org/10.1504/ijmic.2023.10053831. View Article
[3] Md. Rayhan Ahmed, S. Islam, A. K. M. Muzahidul Islam, and S. Shatabda, "An ensemble 1D-CNN-LSTM-GRU model with data augmentation for speech emotion recognition," Expert Systems with Applications, vol. 218, p. 119633, May 2023, doi: https://doi.org/10.1016/j.eswa.2023.119633. View Article
[4] M. Chiu, H.-W. Hsu, K.-S. Chen, and C.-Y. Wen, "A hybrid CNN-GRU based probabilistic model for load forecasting from individual household to commercial building," Energy Reports, vol. 9, pp. 94-105, Oct. 2023, doi: https://doi.org/10.1016/j.egyr.2023.05.090. View Article
[5] I. U. Khan, S. Afzal, and J. W. Lee, "Human Activity Recognition via Hybrid Deep Learning Based Model," Sensors, vol. 22, no. 1, p. 323, Jan. 2022, doi: https://doi.org/10.3390/s22010323. View Article
[6] O. Steven Eyobu and D. Han, "Feature Representation and Data Augmentation for Human Activity Classification Based on Wearable IMU Sensor Data Using a Deep LSTM Neural Network," Sensors, vol. 18, no. 9, p. 2892, Aug. 2018, doi: https://doi.org/10.3390/s18092892. View Article
[7] L. Wang, R. Arablouei, F. A. P. Alvarenga, and G. J. Bishop-Hurley, "Classifying animal behavior from accelerometry data via recurrent neural networks," Computers and Electronics in Agriculture, vol. 206, p. 107647, Mar. 2023, doi: https://doi.org/10.1016/j.compag.2023.107647. View Article
[8] A. Ferrari, D. Micucci, M. Mobilio, and P. Napoletano, "On the Personalization of Classification Models for Human Activity Recognition," IEEE Access, vol. 8, pp. 32066-32079, 2020, doi: https://doi.org/10.1109/access.2020.2973425. View Article
[9] A. Theissler, F. Spinnato, U. Schlegel, and R. Guidotti, "Explainable AI for Time Series Classification: A Review, Taxonomy and Research Directions," IEEE Access, vol. 10, pp. 100700-100724, Jan. 2022, doi: https://doi.org/10.1109/access.2022.3207765. View Article
[10] S. Small, S. Khalid, P. Dhiman, S. Chan, D. Jackson, A. Doherty, A. Price, "Impact of Reduced Sampling Rate on Accelerometer-Based Physical Activity Monitoring and Machine Learning Activity Classification," Journal for the Measurement of Physical Behaviour, vol. 4, no. 4, pp. 298-310, Dec. 2021, doi: https://doi.org/10.1123/jmpb.2020-0061. View Article
[11] J. Wang, T. Zhu, J. Gan, L. L. Chen, H. Ning, and Y. Wan, "Sensor Data Augmentation by Resampling in Contrastive Learning for Human Activity Recognition," IEEE Sensors Journal, vol. 22, no. 23, pp. 22994-23008, Dec. 2022, doi: https://doi.org/10.1109/jsen.2022.3214198. View Article
[12] W. Sousa Lima, E. Souto, K. El-Khatib, R. Jalali, and J. Gama, "Human Activity Recognition Using Inertial Sensors in a Smartphone: An Overview," Sensors, vol. 19, no. 14, p. 3213, Jul. 2019, doi: https://doi.org/10.3390/s19143213. View Article
[13] H. Kim and I. Kim, "Human Activity Recognition as Time-Series Analysis," Mathematical Problems in Engineering, vol. 2015, pp. 1-9, 2015, doi: https://doi.org/10.1155/2015/676090. View Article
[14] K. Choi, "One-tap Sensor Logger" https://www.tszheichoi.com/sensorlogger. (accessed Jan. 3, 2024). View Article
[15] N. Ahmad, R. A. R. Ghazilla, N. M. Khairi, and V. Kasi, "Reviews on Various Inertial Measurement Unit (IMU) Sensor Applications," International Journal of Signal Processing Systems, vol. 1, no. 2, pp. 256-262, 2013, doi: https://doi.org/10.12720/ijsps.1.2.256-262. View Article